ТЕХНИЧЕСКИЕ ОСНОВЫ ФОТОТЕОДОЛИТНОЙ СЪЕМКИ СООРУЖЕНИЙ (из руководства "Руководство по применению фотограмметрических методов для составления обмерных чертежей инженерных сооружений". Москва, 1984 год)
Основные понятия и определения
2.1. При инженерных съемках и исследованиях зданий и сооружений применяют фототеодолитную съемку. Фотографирование выполняется при помощи специальных фотокамер, снабженных ориентирным устройством и уровнями, что позволяет устанавливать фотокамеру в необходимое положение.
Фотокамера фототеодолита состоит из объектива, корпуса и прикладной рамки, к которой прижимается фотопластинка в момент съемки. На прикладной рамке фотокамеры имеются две пары координатных меток xx и zz, которые при фотографировании изображаются на снимках. Координатные метки установлены таким образом, что соединяющие их прямые взаимно перпендикулярны.
В некоторых случаях для съемок сооружений применяют любительские фотоаппараты и киноаппараты.
2.2. В инженерной фотограмметрии применяется фотограмметрический метод, когда для измерительных целей используют одиночные снимки, и стереофотограмметрический, когда задача решается по результатам измерений стереопары.
Фотограмметрический метод съемки применяют для определения положения точек сооружения в плоскости, параллельно которой устанавливается плоскость снимка. Съемку выполняют с одной фотостанции. Если объект фотографируется несколько раз (например, для определения деформаций), то такую съемку называют съемкой с нулевым базисом.
Стереофотограмметрический метод используют в тех случаях, когда необходимо определить пространственное положение точек сооружения по осям XYZ. В этом случае съемку производят с двух точек, расстояние между которыми называется базисом фотографирования.
Обычно фотографирование производится с горизонтального базиса. При исследовании сооружений иногда возникает необходимость фотографирования с вертикального базиса, когда одна фотостанция находится над другой.
Системы координат
2.3. При фототеодолитной съемке различают три основные системы координат:
плоскую прямоугольную систему координат снимка xz. За начало координат здесь принимается точка О - точка пересечения осей xx и zz снимка;
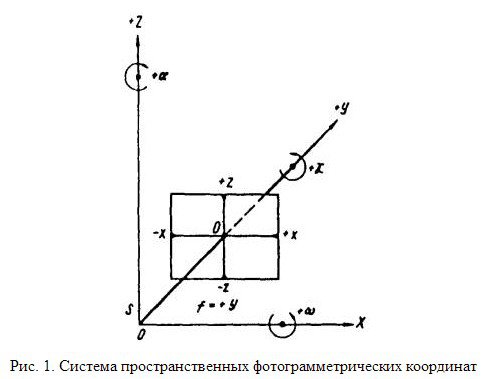
пространственную прямоугольную фотограмметрическую систему координат XYZ. За начало координат принимается передняя узловая точка объектива S при установке фототеодолита на левом конце базиса фотографирования. Ось Z обычно занимает вертикальное положение, а оси X и Y могут занимать различное положение в зависимости от условий съемки и удобства выполнения математической обработки результатов измерений (рис. 1).
При фотограмметрических измерениях применяется правая система пространственных координат;
пространственную прямоугольную геодезическую систему координат Xr, Yr, Zr, которая может быть государственной или условной и в общем случае не совпадать с фотограмметрической.
Геодезические координаты точек объекта получают путем перевычисления фотограмметрических пространственных координат в соответствии с правилами переноса и поворота координатных осей.
При определении взаимного положения точек сооружений определяют только фотограмметрические координаты, не переходя от них к геодезическим.
Элементы ориентирования
2.4. Для определения координат точек объекта по снимкам необходимо знать элементы ориентирования, которые определяют положение снимков в пространстве в момент съемки.
Их разделяют на две группы - внутреннего и внешнего ориентирования.
2.5. Элементы внутреннего ориентирования определяют положение центра проекции относительно снимка. К ним относятся фокусное расстояние f фотокамеры и координаты x0 и z0 главной точки O' снимка (рис. 2).
Фокусным расстоянием фотокамеры называется расстояние между узловой точкой объектива Sz' плоскостью снимка (плоскостью прикладной рамки фотокамеры).
Главным лучом называется проектирующий луч S'O, перпендикулярный плоскости снимка.
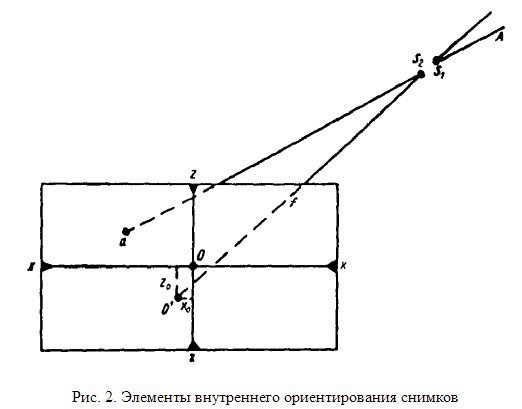
Обычно при изготовлении фотокамеры стремятся установить объектив так, чтобы оптическая ось объектива была перпендикулярна плоскости снимка (плоскости прикладной рамки), т.е. чтобы оптическая ось фотокамеры совпадала с главным лучом фотокамеры. Поэтому часто главный луч фотокамеры называют оптической осью фотокамеры.
Главной точкой снимка называется точка пересечения главного луча с плоскостью снимка. Координатные метки xx, zz прикладной рамки при изготовлении фотокамеры стремятся установить так, чтобы главная точка O' снимка совпадала с началом координат на снимке (с точкой пересечения линий, соединяющих координатные метки xx, zz).
Однако вследствие недостаточно точной установки координатных меток главная точка снимка O' не совпадает с началом координат снимка - точкой O - на величину x0, z0. В процессе юстировки фотокамеры стремятся уменьшить величины x0, z0 по минимума, поэтому координатные метки обычно изготовляют перемещающимися.
При аналитической обработке результатов измерений несовпадение главной точки снимка с началом координат можно учесть введением соответствующих поправок, поэтому положение координатных меток можно не исправлять, а иногда можно и не определять положение главной точки (т.е. не определять значение величин x0, z0).
2.6. Элементы внешнего ориентирования определяют положение фотокамеры относительно принятой пространственной системы координат.
Положение снимка в пространстве определяется шестью параметрами, из которых три линейные и три угловые величины.
Линейными элементами внешнего ориентирования являются координаты центра проекции XS, YS, ZS. Координаты центра проекции определяют в геодезической, условной или пространственной фотограмметрической системе координат.
Угловые элементы внешнего ориентирования могут в зависимости от принятой системы ориентирования иметь разный вид.
В качестве угловых элементов внешнего ориентирования могут быть взяты (см. рис. 1): α - угол вращения снимка в горизонтальной плоскости вокруг оси Z; ω - угол наклона снимка (угол вращения снимка вокруг оси X), χ - угол крена снимка (угол вращения снимка в своей плоскости вокруг оптической оси фотокамеры).
Угловыми элементами внешнего ориентирования могут быть также дирекционный угол направления оптической оси фотокамеры AO, угол наклона оптической оси ω и угол поворота (крена) снимка в своей плоскости χ.
Разница между углами α и A0 заключается в том, что угол α отсчитывается от положительного направления оси Y пространственной фотограмметрической системы координат, а A0 - от положительного направления оси Xi геодезической системы координат.
2.7. Если имеется пара снимков и фотографирование выполняется одной и той же камерой, то считается, что элементы внутреннего ориентирования одинаковы. Следовательно, положение пары снимков в пространстве определяется 15 элементами, из которых 3 элемента внутреннего ориентирования и 12 - внешнего.
Однако вследствие неприжима фотопластинки к плоскости прикладной рамки фотокамеры изменяются элементы внутреннего ориентирования, и поэтому в общем случае можно считать, что положение пары снимков определяется 18 элементами ориентирования.
Обычно для стереопары фототеодолита снимков выбирают систему элементов внешнего ориентирования, исключающую координаты правого конца базиса (центра проекции фотокамеры при установке на правом конце базиса). В этом случае элементами внешнего ориентирования будут: XSA, YSA, ZSA - координаты левого центра проекции; A - дирекционный угол базиса; ψ - горизонтальный угол между базисом и оптической осью левой фотокамеры; ωA - угол наклона оптической оси фотокамеры на левом конце базиса; χ - угол поворота (крена) левого снимка; B - горизонтальное положение базиса; Bz - превышение правого конца базиса относительно левого; γ - угол конвергенции (горизонтальный угол между оптическими осями фотокамеры при установке на левом и правом концах базиса); ωП - угол наклона оптической оси фотокамеры на правом конце базиса; χП - угол поворота правого снимка.
Выбор такой системы обусловлен тем, что эти величины обычно определяются при фототеодолитной съемке.
Основные случаи съемки
2.8. При съемке оптическая ось фотокамеры может занимать различное положение относительно горизонта и линии базиса. В зависимости от принятых угловых элементов внешнего ориентирования различают пять основных случаев съемок: нормальный, равноотклоненный, конвергентный, равнонаклоненный и общий. При нормальном случае съемки (рис. 3,а) оптические оси левой и правой фотокамер устанавливаются горизонтально и перпендикулярно базису B, плоскость снимка занимает отвесное положение.
Нормальный случай съемки применяется чаще, так как он обеспечивает наиболее точные результаты и упрощает математическую обработку.
При равномерно отклоненном случае съемки оптические оси левой и правой фотокамер отклоняются вправо или влево на один и тот же угол α для расширения горизонтального угла охвата снимаемого объекта (рис. 3,б, в). Прыжок с парашюта или моста наполняет человека новыми ощущениями, но такое развлечение небезопасно для жизни. Получить те же эмоции можно не выходя из собственно дома для этого достаточно перейти в зал . Там каждый игрок найдет развлечение для себя, есть нарды, покер, игровые автоматы, рулетка и, конечно же, карточные игры. Для тех, кто не любит рисковать вообще предусмотрен бесплатный режим игры. В результате этого с одного базиса можно получить три стереоскопические пары снимков: стереопару для нормального случая съемки, стереопары со скосом влево и вправо.
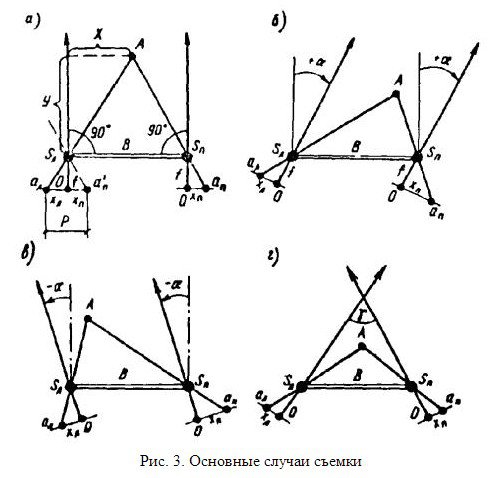
При конвергентном случае съемки оптические оси левого и правого снимков пересекаются под углом γ (рис. 3,г).
При равномерно наклоненном случае съемки оптические оси левой и правой фотокамер наклонены на один и тот же угол ω; этот случай применяется при съемке высоких сооружений.
При общем случае съемки положение оптических осей фотокамеры может быть произвольным.
Наибольшее применение в практике имеют нормальный и равномерно отклоненный случаи съемки. Остальные случаи используют редко - главным образом при определении координат отдельных точек аналитическим методом, когда основные способы съемок по тем или иным обстоятельствам не обеспечивают решение задачи.
Основные формулы фототеодолитной съемки
2.9. К основным формулам фототеодолитной съемки относятся формулы связи координат точек снимка и местности при нормальном и равномерно отклоненном случаях съемки.
2.10. При нормальном случае съемки пространственные координаты точек объекта при стереофотограмметрических измерениях по стереопаре снимков определяют по формулам:

где В - базис фотографирования;
f - фокусное расстояние фотокамеры;
p = xл - xп - продольный параллакс определяемой точки;
x, z - координаты определяемой точки на левом снимке.
2.11. Для равномерно отклоненного случая съемки, когда за ось Y принято направление оптической оси камеры, связь координат точек снимка и объекта выражается формулами:
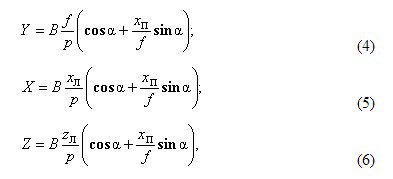
где α - угол отклонения оптической оси от перпендикуляра к базису (см. рис. 3,б).
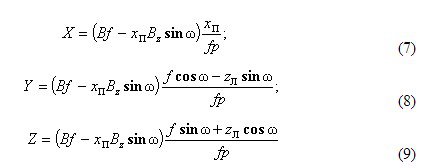
2.12. При нормальном случае съемки с равномерно наклоненными осями пространственные, координаты вычисляют по формулам:
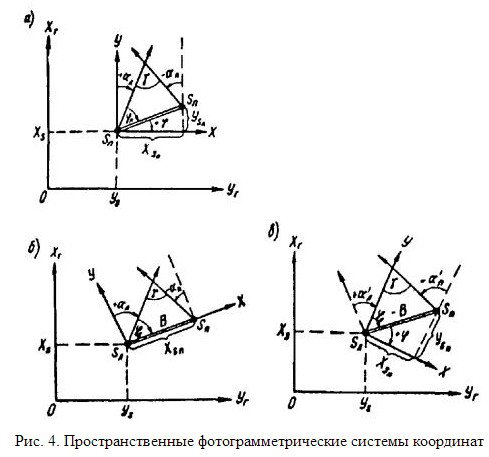
2.13. Вид формул для определения пространственных фото грамметрических координат может изменяться в зависимости от принятой пространственной фотограмметрической системы координат X, Y, Z.
В пространственной системе координат за начало координат обычно принимается центр проекции левого снимка. Направление осей X и Y принимается горизонтальным. За положительное направление оси Y принимаются:
- направление, параллельное оси X геодезической системы (рис. 4,а);
- направление, перпендикулярное базису (рис. 4,б);
- направление оптической оси (горизонтальное положение) левого снимка (рис. 4,в).
Кроме этих направлений могут быть выбраны и другие, однако все формулы для определения пространственных координат при других выбранных положительных направлениях оси Y фотограмметрической системы могут быть получены путем замены в соответствующих формулах первых трех систем X на Y или X на Z и наоборот. Таким образом, практически применяют только формулы для первых трех выбранных направлений для положительной оси Y фотограмметрической системы координат.
2.14. Переход от пространственной фотограмметрической системы координат к геодезической выполняется по формулам:
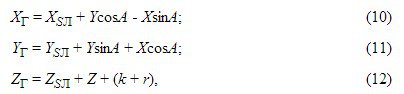
где XSЛ, YSЛ, ZSЛ - геодезические координаты левого центра проекции;
A - дирекционный угол оси Y фотограмметрической системы координат;
k + r - поправка на кривизну Земли и рефракцию.
При инженерных съемках сооружений поправку k + r не учитывают, так как она мала или как постоянная величина при примерно одинаковых отстояниях Y войдет составной частью в поправку за нарушение элементов ориентирования.
2.15. Все формулы для определения пространственных фотограмметрических координат можно обобщить и привести к виду, аналогичному для нормального случая съемки:

В формулах (13) - (15) трансформированные значения xt, zt, pt определяются по формулам:
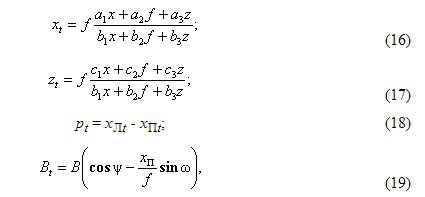
где ai, bi, ci - направляющие косинусы между координатными осями снимка x, y(f), z и координатными осями трансформированного снимка;
ψ = 90° - (αЛ - φЛ) - угол поворота оси X пространственной фотограмметрической системы координат относительно базиса.
Направляющие косинусы определяются по формулам:
a1 = cosα·cosχ - sinω·sinα·sinχ;
a2 = sinα·cosω;
a3 = -cosα·sinχ - sinα·sinω·sinχ;
b1 = -sinα·cosχ - cosα·sinω·sinχ;
b2 = cosα·cosω;
b3 = sinα·sinχ - cosα·sinω·cosχ;
с1 = cosω·sinχ;
с2 = sinω;
с3 = cosω·cosχ;
где α, ω, χ - углы внешнего ориентирования относительно принятой системы пространственных фотограмметрических координат.
Точность фототеодолитной съемки
2.16. Точность определения пространственных координат точек объекта зависит в основном от погрешностей измерений снимков, геометрических искажений изображения, погрешностей определения элементов внутреннего и внешнего ориентирования снимков, способа обработки результатов измерений, применяемого случая съемки (нормальный, равномерно отклоненный и т.п.), величины базиса и расположения точек относительно фотостанций.
2.17. При стереофотограмметрической съемке для нормального случая средние квадратические погрешности определения пространственных координат на основании формул (1) - (3) будут определяться по формулам:
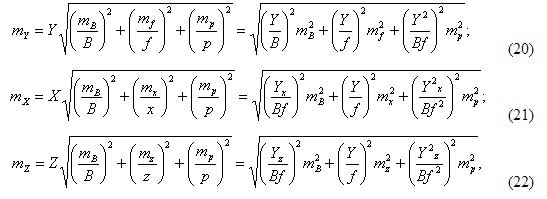
где mB - средняя квадратическая погрешность измерения базиса фотографирования;
mf - средняя квадратическая погрешность определения фокусного расстояния фототеодолита;
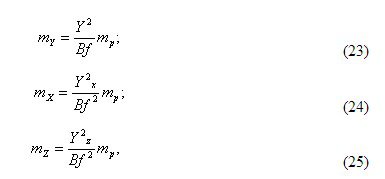
mp, mx, mz - средние квадратические погрешности измерения продольного параллакса к координат точек снимка. При приближенных расчетах можно принять:
2.18. При равномерно отклоненном случае съемки средние квадратические погрешности определения пространственных координат определяются по формулам:
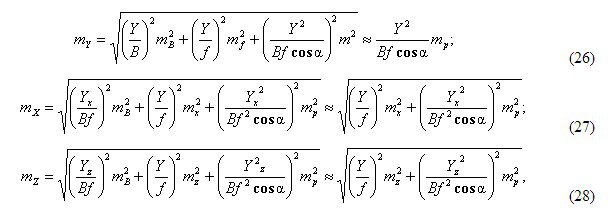
или при приближенных расчетах:
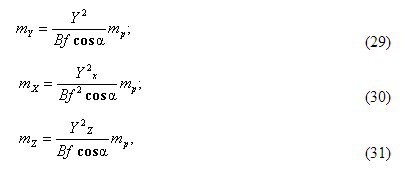
Таким образом, при равномерно отклоненном случае съемки погрешности в определении X, Y, Z, зависящие от mp, увеличиваются в 1/cosα раз.
Следовательно, нормальный случай при всех прочих равных условиях имеет большую точность, чем равномерно отклоненный.
#фототеодолитнаясъемка #фиксация #обмерныеработы #обмеры #памятникиархитектуры #техническиеаспекты #историческаяценность #photogrammetria #фотограмметрия
---








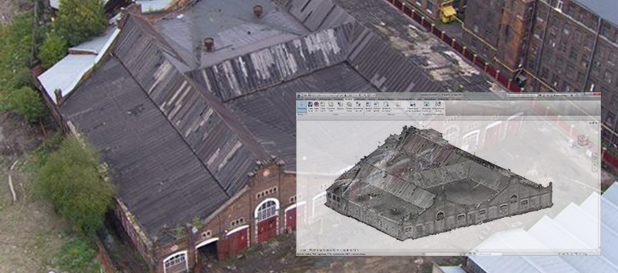


 Программный комплекс ScanIMAGER предназначен для обработки результатов трехмерного лазерного сканирования применительно к архитектурным обмерам. Он построен по модульному принципу и поставляется в различных модификациях.
Программный комплекс ScanIMAGER предназначен для обработки результатов трехмерного лазерного сканирования применительно к архитектурным обмерам. Он построен по модульному принципу и поставляется в различных модификациях.