Стереофотограмметрическая обработка снимков с неизвестными элементами ориентирования
В архитектурной фотограмметрии обработка архивных снимков является одной из сложнейших задач, однако именно она зачастую является единственным вариантом получения данных о геометрических параметрах объекта.
Обработка архивных фотоснимков построена на методах классической фотограмметрии для наземного случая съемки. А значит, положение точки объекта определяется в пространственной прямоугольной системе координат SXYZ, которая является правой фотограмметрической системой координат, причем начало и направление ее осей могут быть выбраны как произвольно, так и с плоскостью XY установленной горизонтально, или в левой геодезической системе координат OXr Yr Zr, в которой плоскость Xr Yr всегда горизонтальна [7].
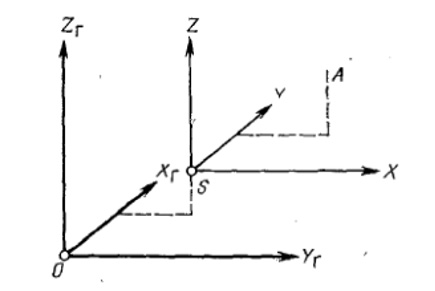
Рис. 13. Система координат OXr Yr Zr
Тогда если начало фотограмметрической системы координат находится в точке фотографирования S, и при этом оси X и Y являются параллельными осям X_r и Y_r, геодезические координаты точки местности А можно найти по формулам:
Xr=Xrs+Y;
Yr=Yrs+X;
Zr= Zrs+Z (1),
Yr=Yrs+X;
Zr= Zrs+Z (1),
в которых Xr, Yr, и Zr это геодезические координаты точки фотографирования S, а X, Y и Z это фотограмметрические координаты точки местности [7].
Для определения местоположения точек на снимке используется прямоугольная система координат о’zx, в которой начало координат о’ не совпадает с главной точкой снимка о, и ось z не является перпендикулярной оси x. Координаты главной точки снимка обозначаются как x0 и y0. Если мы берем снимки P1 и P2, образующие стереопару, это такие снимки, на которых изображен один и тот же объект с разных точек фотографирования, то на них можно отметить соответственные точки а1и а2, тогда продольный и поперечный параллаксы можно выразить формулами:
p= x1- x2; q= z1- z2 (2).
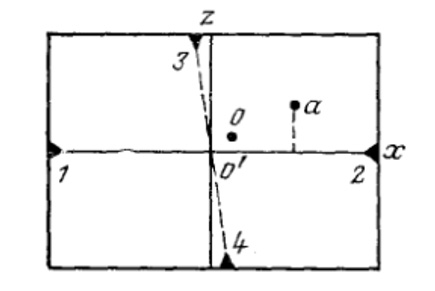
Рис. 14. Система координат о’zx.
В системе координат SXYZ пространственные координаты точки снимка, обозначим их как X’, Y’ и Z’, можно найти по плоским координатам x и z, через введение вспомогательной системы координат Sx’y’z’, которая начинается в центре проекции S, ось y’ совпадает с главным лучом S0, а x’ и z’ параллельны осям х и z системы координат о’zx [7]. В таком случае координаты точки a будут выражены как:
x’= x- x0; y’=ז; z’= z- z0 (3).
Тогда по формулам преобразования координат получается:
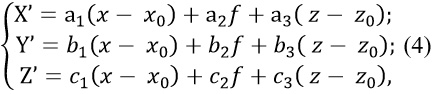
где а1, а2 и а3 - это косинусы углов от оси X с осями x’, y’ и z’, а b1,b2 и b3 - это косинусы от оси Y, с этими же осями соответственно, c1, c2 и c3 косинусы углов составленных осью Z с осями x’, y’ и z’. Эти косинусы являются направляющими косинусами, причем из девяти косинусов независимы только три, значит девять косинусов зависят от трех параметров – угловых элементов внешнего ориентирования снимков [7].
Положение одиночного снимка в пространстве может быть задано девятью элементами ориентирования: тремя внутренними, это фокусное расстояние f и координаты главной точки x0 и z0, и шестью элементами внешнего ориентирования, это координаты точки фотографирования Xrs, Yrs, Zrs и углы α, ω и k. Соответственно, если снимка два, число элементов ориентирования удваивается, а если больше, то оно увеличивается относительно числа снимков [7]. Направляющие косинусы и угловые элементы внешнего ориентирования созависимы, так направляющие косинусы равны:
а угловые элементы ориентирования могут быть найдены по формулам:

Элементы внешнего и внутреннего ориентирования можно найти по опорным точкам с помощью пространственной фотограмметрической засечки, в которой зависимость между координатами точки x и z на снимке и ее координатами X, Y и Z на объекте выражена как:

где
здесь координаты главной точки снимка x_0 и z_0, фокусное расстояние это f, координаты точки фотографирования это Xs, Ys, Zs, а аi, bi и ci это направляющие косинусы. Два уравнения (7) можно использовать если координаты точки объекта известны, для решения такой задачи нужно иметь не менее 5 опорных точек и тогда мы получим десять уравнений решениями которых станут все элементы ориентирования. Если же элементы внутреннего ориентирования известны, то нужно не менее трех точек [7].
Что касается пространственной фототриангуляции, то интерес для нас представляет способ уравнивания связок проектирующих лучей для наземного случая съемки, в котором построение сети происходит непосредственно в системе координат местности с использованием коллинеарности соответствующих векторов. В данном способе уравнивание и построение фотограмметрической сети происходит одновременно по всем снимкам [7]. Сущность этого способа заключается в математической зависимости между координатами точки на местности X, Y и Z, координатами ее изображения на снимке x и y и элементами внешнего ориентирования - это координаты точки фотографирования Xs, Ys, Zs и углы α, ω и k. Эта математическая зависимость может быть выражена как:
где аi, bi и ci это направляющие косинусы, вычисляемые по угловым элементам внешнего ориентирования по формулам (5), а f это фокусное расстояние [7].
В данных формулах 9 неизвестных, приближенные значения которых мы обозначим как XS0, YS0, ZS0, α0, ω0, k0, X0, Y0, Z0, а поправки к ним через δXS, δYS, δZS, δα, δω, δk, δX, δY, δZ. Затем используя эти обозначения запишем уравнения (9) и приведем их к линейному виду через разложение в ряд Тейлора:

где
lx=(x)-x, ly=(y)-y (11),
здесь a, b…, i - это элементы разложений в ряд Тейлора в виде производных функций по соответствующим неизвестным формулы (9), а (х) и (у) это координаты точки, определяемой на снимке, найденные из приближенных значений также по формуле (9), vx и vy это поправки к измеренным координатам [7]. Для опорных же точек дополнительно составляются уравнения поправок вида:

где δXS, δYS, δZS, δXi, δYi, δZi это поправки к приближенным координатам опорных точек и центров фотографирования, а li это разности приближенных и исходных значений координат опорных точек и центров [7].
Условием для решения уравнений (12) и (10) является [vvp] = min, причем веса устанавливаются в зависимости от надежности опознавания точек снимков и качества изображения. Общее число уравнений в системе всегда больше числа неизвестных, а значит система переопределена и ее решение под данным условием возможно методом наименьших квадратов. Коэффициенты a, b…, i зависят от определяемых величин, именно поэтому систему решают методом приближений, причем в каждом приближении уточняются свободные члены и коэффициенты при неизвестных, а остановка итераций происходит после того, как поправки к неизвестным окажутся меньше допуска. На сходимость итерационного процесса влияют уклонения начальных значений неизвестных от их точных значений [7].
Фрагмент Выпускной квалификационной работы бакалавра Пупыревой Евгении Валерьевны "Исследование и оптимизация методов фотограмметрической обработки архивных снимков для задач реставрации или воссоздания утраченных памятников и других объектов".
#архивныеснимки #фотограмметрия #архитектурныеобмеры #обработкаснимков #методыобработки #обмеры #архитектурнаяфотограмметрия










 Программный комплекс ScanIMAGER предназначен для обработки результатов трехмерного лазерного сканирования применительно к архитектурным обмерам. Он построен по модульному принципу и поставляется в различных модификациях.
Программный комплекс ScanIMAGER предназначен для обработки результатов трехмерного лазерного сканирования применительно к архитектурным обмерам. Он построен по модульному принципу и поставляется в различных модификациях.