В настоящее время известно большое количество программных продуктов для обработки результатов наземного лазерного сканирования и 3D моделирования. Именно поэтому задача правильного выбора специализированной программы для этих целей является весьма актуальной. Чтобы решить поставленную задачу, необходимо выделить ряд критериев, по которым мы сможем всесторонне оценить то или иное программное обеспечение. Итак, рассмотрим такие возможности программы, как:
Для анализа было выбрано несколько программных продуктов, которые на данный момент являются ведущими в области обработки данных лазерного сканирования:
Все эти специализированные программы были изучены по вышеуказанным критериям на предмет возможности их применения в качестве программного обеспечения для создания 3-D моделей по данным лазерного сканирования. Результаты исследования были обобщены и приведены в таблице №1.
Cyclone
Наиболее универсальная программа для обработки облаков точек и управления сканером. Cyclone состоит из отдельных модулей (рис.1), встраиваемых в единую программную оболочку. Различные модули предназначены для решения отдельных задач общего процесса обработки данных трехмерного лазерного сканирования.
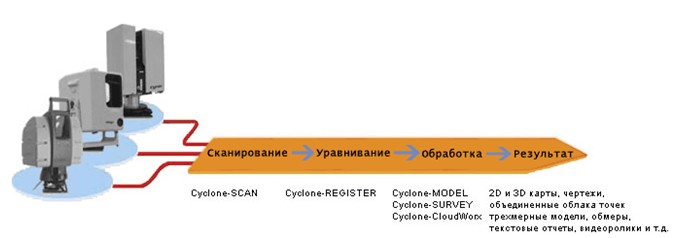
Рисунок 1. Схема модулей программы Cyclone.
Cyclone-Scan - это модуль для управления работой сканера. Пользователь может настраивать плотность сканирования, фильтрацию данных, создавать собственные макрокоманды и сканировать.
В Cyclone-Register есть все функции для быстрого и точного уравнивания облаков точек, сделанных с различных станций съемки. Cyclone-Register автоматически распознает стандартные визирные марки, а также связывает сканы по характерным связующим точкам без визирных марок.
Модуль Cyclone-Model дает возможность обрабатывать облака точек, превращая их в объекты для экспорта и импорта в системы автоматизации проектных работ (САПР). Имеются мощные средства поддержки комплексных топографических моделей с возможностью сглаживания нерегулярных сетей треугольников поверхности, что позволяет уменьшать объемы данных при сохранении точной геометрии. Достаточно легко, непосредственно из облака точек создаются сечения вдоль ломанной, а также линии равных высот (изолинии). Функция определения рядом стоящих точек даёт возможность быстро и точно создавать трехмерные модели из облаков точек. Функция работает следующим образом: выбирается одна или несколько точек, затем с помощью алгоритма наилучшего размещения программа автоматически находит соседние точки, удовлетворяющие условию построения соответствующей фигуры. И алгоритм работает до тех пор, пока вновь найденные точки не будут удовлетворять условию построения фигуры. Таким образом, можно построить цилиндры (трубы), плоскости, сглаженные поверхности. Алгоритм основан на методе наименьших квадратов и все статистические данные (СКО, среднее и максимальное отклонение от среднего и т.д.) показывают надежность построения модели.
Cyclone Object Exchange – бесплатная программная утилита для обмена данными между Cyclone и AutoCAD (2000 или более новый) и MicroStation (SE, /J и V8).
Trimble 3Dipsos 3.0
Данная программа предназначена для создания 3D-моделей сложных технологических установок, промышленных площадок, цехов по данным наземного лазерного сканирования (НЛС). Используется для моделирования сложных промышленных установок, состоящих из огромного количества труб, профилей, фланцев, вентилей, а также трёхмерного представления объектов, каждый из которых описывается атрибутивной информацией (является быстрым и современным средством документирования и инвентаризации технологического оборудования, используемое в нефтегазовой, добывающей, перерабатывающей и других отраслях). Пользовательский интерфейс довольно сложный и разработан для профессионалов.
Также есть возможность модификации пользовательского интерфейса, присутствует внутренний язык программирования. На всех этапах моделирования 3Dipsos совместим с AutoCAD. Помимо моделирования на уровне примитивов, 3Dipsos, как и Cyclone обладает стандартными возможностями по сшивке сканов, сегментированию, построению и редактированию триангуляционных сетей.
Metris Focus Inspection
Metris Focus Inspection представляет собой набор инструментов для быстрого изучения крупномасштабных облаков точек, собранных с использованием сканеров. Также, как и Cyclone, Trimble 3Dipsos 3 MFI позволяет заменять облака точек на геометрические примитивы.
Так как данный продукт был разработан в большей мере для автомобилестроительной отрасли, то он обладает рядом функций, которые не прослеживаются в других программах. Например, существует возможность задания геометрических характеристик и допусков для объекта, позволяет формировать отчеты на базе готовых шаблонов и допускает экспорт результатов исследований в системы статистического контроля производственных процессов.
По нашему мнению MFI не может составить достойную конкуренцию другим ПО по 3-D моделированию, так как в связи со своей узконаправленностью не отвечает всем запросам по обработки данных сканирования. (в частости, не развита возможность создания триангуляционных сетей mesh).
PolyWorks/Modeller
Данная программа так же, как и Cyclone, состоит из отдельных модулей, которые по аналогии с модулями Cyclone отвечают за объединение облаков точек в цельное изображение, переход от объединенного облака точек к триангуляционной модели. Также в программе реализованы различные механизмы создания кривых и инструменты их редактирования, а также функции создания и редактирования NURBS-поверхностей, строящихся по кривым). Кривые могут создаваться вручную по указанным точкам, как пересечение некоторой плоскости с моделью, по сечениям, формироваться автоматически в виде сетки, отстоящей от модели на заданном расстоянии и повторяющей ее с заданной точностью. Поверхность NURBS описывается сплайнами Безье и является твердотельной моделью объекта, которая может быть экспортирована в различные конструкторские программы для анализа или редактирования (изменение геометрической формы, задание физических свойств материала для расчета центра масс, анализ поведения при различных нагрузках и др.).
Можно выделить следующие полезные функции программы: возможность проведения детального сравнения как внутри массивов данных, ссылочных объектов и примитивов, так и между ними; возможность получения статистических и отчетных материалов, а также контроля положения и состояния сложных конструкций (измерение линейных и угловых размеров, площадей, объемов).
Trimble RealWorks Survey
TRWS, как и другие ПО, позволяет производить сшивку (геопривязку) данных, редактирование точечной модели (чистку, разрежение) и непосредственно обработку, тип которой зависит от способа представления конечного результата.
Стоит отметить, что RWS разрешает производить сшивку сканов несколькими способами, один из которых представляет собой автоматическую подгонку - программный способ сшивки, при котором итерационный алгоритм смещает один скан относительно другого и находит оптимальное положение по выбранным трём точкам на каждом скане, которые хорошо идентифицируются. Такой способ сшивки был выявлен нами только в данном продукте.
Кроме того, RWS обладает следующими функциями:
1) сегментирование - разбиение облака точек на сегменты ("подоблака") для упрощения дальнейшей работы и очистки от "мусора" (нежелательных объектов, попавших в сектор съёмки);
2) построение срезов, сечений. Сечения могут проводиться в любой плоскости, с любым интервалом;
3) построение изолиний;
4) векторизация 3D- и 2D-полилиний по трёхмерному точечному растру;
5) инспектирование - количественный анализ, картирование и визуализация отклонений между объектами съемки. Эта функция используется для сравнивания данных сканирования с проектом или для мониторинга - выявления изменений геометрии объекта с течением времени;
6) создание триангуляционной, или TIN-поверхности.
7) ортопроецирование.
8) трехмерное моделирование - новый модуль, появившийся в последней, 6-й версии программы, позволяет встраивать в облака точек и редактировать геометрические примитивы - плоскости, цилиндры, конусы, торы и т.д.
Также имеется возможность дешифровки и классификации объектов, а кроме того, программа работает с изображениями, получаемыми как со сканера, так и со сторонней камеры, что позволяет накладывать текстуры на полигональные модели для раскрашивания точечной модели.
На наш взгляд TRWS является полноценной программой для 3-D моделирования и обработки данных сканирования, но к сожалению мы не смогли более глубоко изучить её возможности, так как компания Trimble не предоставляет учебных версий программ для своих покупателей.
Z+F LaserControl
Z+F LaserControl – это программа, предназначенная для управления сканером и для генерации облаков точек. Она поставляется вместе со сканером и именно в ней происходит как сама съёмка, так и предварительная обработка данных (регистрация сканов, редактирование облаков точек, создание первичной 3-D модели и видеофайлов, создание ортофотоизображений по которым в программе Autocad создаются чертежи фасадов зданий, архитектурного оформления и т.д., тем самым, затраты времени на выполнение чертежей сокращаются).
Приступая к сканированию, мы имеем возможность провести съёмку в одном из 3 режимов:
1) непосредственно все материалы записываются в память сканера. Данный режим неудобен, так как управление сканером осуществляется с помощью кнопок управления на контрольной панеле.
2) управление через Интернет-страницу прибора.
3) управление с помощью программы Z+F LaserControl через сеть. На наш взгляд это самый рациональный вариант, так как данные сохраняются сразу на ПК в проект, а также имеется возможность непосредственно в полевых условиях провести распознавание марок на скане. После завершения сканирования облако точек загружается в Z+F LaserControl автоматически.
Работу с облаком точек следует начать с регистрации скана, при этом для упрощения процесса несколько сканов могут быть объединены в проект.
Регистрация скана происходит следующим образом:
1) на начальном этапе, непосредственно в поле после завершения работы, на скане отмечаются марки (для регистрации одного скана необходимо 3 марки, расположенные не на одной горизонтальной плоскости). Для этого необходимо указать предполагаемое местонахождение марки (то есть, нет необходимости точно выверять её расположение), и далее Z+F LaserControl в автоматическом режиме найдёт центр искомой марки. Также записывается номер марки.
2) данные марки в поле измеряются тахеометром и в дальнейшем в камеральных условиях вычисляются их координаты в местной системе координат или мировой (в зависимости от поставленной задачи). Координаты вместе с номерами точек записываются в текстовый файл. Следует учесть, что у сканера правая система координат, поэтому в значении y необходимо поставить знак минус.
3) на заключительном этапе с помощью функции register происходит непосредственно регистрация сканов.
После завершения регистрации можно приступать к предварительной обработке облаков точек.
В Z+F LaserControl мы можем создавать различные маски (иными словами выбирать из облака точек, только те области, которые участвуют в дальнейшей обработке изображения). При создании маски имеется возможность удалять точки, которые являются некорректными из-за того, что лазерный луч отразился от ребра. В этом случае часть лазерного излучения попадает на весь объект, а другая часть рассеивается. В результате мы имеем точки, расположенные отдельно между объектами и которые должны быть удалены. Этот фильтр не изменяет данных. Он создаёт маску (по одному биту на точку) и маркирует только некорректные точки. Также стоит упомянуть о возможности отключать все точки в диапазоне дальности большей или меньшей, чем определено в соответствующем диалоговом окне.
После создания маски, переходим в окно изображения 3-D. При выполнении перехода можно выбрать размер точек и их плотность (для того, чтобы уменьшить размер файла, потому что Z+F LaserControl имеет пределы в возможности обработки данных).
Теперь можно перейти к созданию триангуляционной сети на основе облака точек. Эта функция в данном программном обеспечении присутствует, но использовать её в полной мере (создание триангуляционных сетей на большие площади) невозможно в виду нескольких причин:
- LaserControl не может обрабатывать большие облака точек (например, фасад целого здания)
- файл с преобразованием облака в mesh-объект можно записать только с расширением *.iv. Данный формат не открывается ни одним программным продуктом, который имеется в открытом доступе.
Kubit Point Cloud
Kubit Point Cloud – это дополнительный модуль к программе AutoCAD, предназначенный для визуализации и анализа миллионов (При наличии 2 Гб оперативной памяти, программа позволяет загружать до 30 млн.) точек в 3-D режиме, расширяющий возможности AutoCAD в представлении больших облаков точек и их управлении.
Основной формат импорта данных – обычный текстовый, где для каждой точки даны её координаты и (если присутствуют) данные об интенсивности или цвете. Экспорт в такой формат возможен практически из любой программы предназначенной для обработки данных лазерного сканирования, в том числе из программ Z+F LaserControl и 3Dipsos. Импортированные точки сохраняются в виде бинарного PTC-файла, который занимает меньший объём и быстрее загружается, чем обычный текстовый.
Данный модуль имеет ряд функций, которые существенно упрощают обработку данных при дальнейшем проектировании. Среди них можно выделить следующие:
1) импорт облаков точек с данными о цвете и интенсивности отражения для каждой точки (рис.)
2) одновременная работа с облаком точек и подложенными ориентированными изображениями.
3) сегментирование облака точек с возможностью показа и скрытия отдельных сегментов. Данная функция полезна при создании профилей фасада (
4) поддержка функции Pointsnap, которая допускает идентификацию координат каждой точки. Далее облако точек может обрабатываться стандартными командами AutoCAD.
5) изменение количества точек при динамическом или статическом положении точек. При этом после прекращения команды количество точек становится начальным. Программа позволяет отключить/включить точки, цветность.
6) создание дополнительных плоскостей, которые используются в дальнейшем при создании чертежей в 3-D.
Одна из особенностей данного ПО — создание ориентированного изображения, которое помогает упростить определение принадлежности облаков точек к тому или иному объекту. Для создания ориентированного изображения нам нужно иметь фотографию, полученную с примерного места сканирования и необходимо знать элементы её внутреннего ориентирования: координаты цетральной точки, физический размер пиксела матрицы камеры, разрешение матрицы и матрицу поворота, которая рассчитывается по элементам внешнего ориентирования. В результате ряда преобразований на основе фотографии мы получаем ориентированное изображение, которое подключатся в среду Kubit Point Cloud: по ней можно производить отрисовку объектов – вычерченные линии будут отображаться в окне облака точек. Также имеется ряд функций по созданию дополнительных плоскостей – они необходимы во избежании смещения линий в связи с привязкой к точкам, находящимся не в плоскости черчения. На мой взгляд данный способ создания 3-D моделей не совсем удобен, так как достаточно много времени тратится на ручную обработку данных, что не является целесообразным решением.
Стоит отметить, что Kubit Point Cloud в отличие от Cyclone, Rapidform XOS и др. программных продуктов не имеет возможности создания mesh-поверхностей, без которых невозможно построение полноценной твёрдотельной модели, поэтому использование его в качестве основного программного продукта для обработки данных сканирования невозможно. Но между тем, на мой взгляд, нельзя забывать о главной особенности PointCloud – возможности использования в полной мере мощности системы проектирования AutoCAD (при этом в случае отсутствия задачи в построении твёрдотельной модели исчезает необходимость в изучении других программных продуктов).
RapidForm
RapidForm – мощное средство обработки данных лазерного сканирования от корейской компании INUS Technology. Логически программный продукт разделен на самодостаточные разделы, каждый из которых выполняет конкретную задачу и соответствует определенному этапу работы с трёхмерной моделью. В моё распоряжение было предоставлена два раздела:
- RapidForm XOS/Scan, который включает в себя инструменты по первичной обработке облаков точек, несколько методов сшивки и создание TIN-поверхности.
- Rapidform XOR/Redesign, который позволяет создавать полноценную СAD-модель.
RapidForm XOS/Scan
Приступая к пошаговому описанию возможностей данной программы, хочется отметить, что для обработки данных сканирования требуются большое количество оперативной памяти, поэтому ряд важных функций я не смогла описать на примере моей модели. Мною было принято решение представить их на более примитивных сканах, которые предоставлены на официальном сайте www.rapidform.com в качестве учебного материала.
Первый шаг – это импорт облака точек. RapidForm XOS работает с файлами различных расширений (pts, xdl, stl, dxf и др.)
Второй шаг – после импорта облака точек мы попадаем в раздел программы Mesh Buildup, в котором происходит поэтапная обработка облака точек:
1) Удаление малых скоплений точек, которые не нужны для создания триангуляции mesh. Они могут образовываться в результате залёта сканирующего луча сканера за пределы территории. Программа сама отыскивает мелкие ненужные части, что на мой взгляд существенно облегчает дальнейшее редактирование.
2) Следующая немаловажная функция, которую следует упомянуть – совмещение нескольких облаков точек в единый массив. Необходимость в соединении нескольких облаков точек может возникнуть при съёмке интерьера помещений, скульптур.
Принцип объединения основан на том, что из множества сканов мы сначала выбираем два (один – основной, другой - редактируемый). Далее по 3 точкам, расположенным единовременно на каждом из сканов совмещаем их и повторяем данную операцию со всеми оставшимися облаками точек.
Стоит отметить, что данную операцию также возможно провести и в автоматическом режиме, но в большинстве случаев она выполнялась некорректно, а при большом количестве разрозненных облаков точек процесс соединения их вручную занимает много времени. Поэтому однозначно говорить об успешной реализации данного приёма в RapidForm XOS невозможно.
3) При создании единой сети триангуляции mesh пользователь имеет возможность указать плотность её построения, а также после её построения провести редактирование сети.
Третий шаг – Наличие функции редактирования имеющейся сети триангуляции существенно повышает возможности дальнейшей обработки данных и является несомненным плюсом данного программного продукта.
Единственное затруднение, с которым пришлось столкнуться на этом этапе - RapidForm XOS требует большого количества оперативной памяти и большие облака точек с высокой плотностью обрабатывает очень тяжело и долго.
Четвёртый шаг – построение сплайнового каркаса и 3-D модели.
На данном этапе мы столкнулись с некоторыми трудностями, связанными с построением сплайнов вручную. Дело в том, что не всегда удаётся отразить все градации формы, углы, характерные выпуклости и вогнутости модели, поэтому создать каркас, который отображает реальную картину, становится почти невозможным в том случае, если мы обрабатываем сложные объекты (например, нарушение фасада, места его разрушения).
RapidForm XOS имеет одну важную функцию, которая позволяет оценивать расхождения между исходной триангуляционной моделью и твердотельной моделью. У нас имеется возможность варьировать допуски и получать различные изображения фоновой закраски. На основе данного сплайнового каркаса была предпринята попытка построить твердотельную модель, но в RapidForm XOS данная функция сработала некорректно, и представить какие либо результаты по данной части невозможно.
После завершения создания сплайнового каркаса, мною были созданы твердотельные модели данных объектов.
Подводя итог по данному программному продукту, хочется отметить, что RapidForm XOS идеально подходит для создания сетей триангуляции на основе данных сканирования, а также удовлетворяет все потребности в построении тведотельной модели.
Стоит отметить, что в ходе построения mesh-объектов и твердотельных объектов мёртвые зоны (области объекта, недоступные при сканировании) отображаются неверно и требуют дальнейшей доработки в следующем модуле программы Rapidform XOR/Redesign.
Rapidform XOR/Redesign
Как уже было отмечено ранее, в основные задачи, которые решает Rapidform XOR/Redesign, входит создание полноценной CAD-модели.
Первый шаг. - Rapidform XOR/Redesign не распознаёт файлы формата *.dxf в отличие от первого приложения XOS, поэтому с помощью 3ds max я перевела данные в файл формата 3ds. Также на этом этапе с помощью функции перевода «mesh-data», я трансформировала данные в mesh-объекты. Это необходимо сделать для того, чтобы в дальнейшем данные объекты распознавались, как mesh и с ними можно было бы производить mesh-операции.
Второй шаг. – Созданий сплайнового каркаса. В этом приложении создание сплайнового каркаса выполняется в разделе Mesh Sketch.
Третий шаг. – Редактирование твердотельной модели. На завершающем этапе, для того, чтобы построить модель, которая полностью бы отражала действительный объект, я произвела отсечение части полученной фигуры в определённой плоскости.
Построенные модели отличаются большой реалистичностью, наглядностью, а также точностью построения, что на мой взгляд является большим плюсом.
Оценивая данный ПО в целом,, надо сказать, что для построения mesh-объектов и твердотельных моделей оно подходит наилучшим образом, благодаря наличию ряда функций, недоступных в других аналогичных ПО, а также весьма дружелюбному к ползователю интерфейсу, что значительно упрощает его освоение.
Итоги обзора и изучения основных программных продуктов по обработке данных сканирования и созданию 3-D моделей приводятся в таблице-рейтинге «Базовое программное обеспечение для обработки данных наземного сканирования, представленное в России», составленной по ряду показателей, которые наиболее востребованы при создании архитектурных моделей. Стоит учитывать, что при изменении цели использования (например, при промышленном моделировании) программного продукта, данный рейтинг может поменяться (таблица №1).

Таблица 1. Базовое программное обеспечение для обработки данных наземного сканирования, представленное в России.
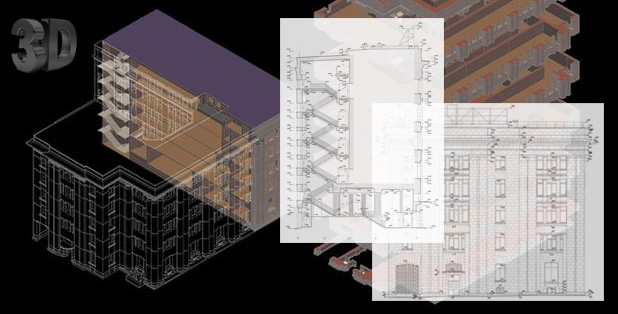
После проведения исследования, в ходе которого было выяснено, что наиболее подходящим продуктом для обработки данных трехмерного лазерного сканирования является программа RapidForm, мною были успешно изучены основные доступные модули программы и построены трёхмерные модели архитектурных элементов (mesh-объекты и твердотельные модели).
Автор исследования:
Огурцова Анна. Исследование программного обеспечения для обработки данных наземного лазерного сканирования и создание 3-D моделей объектов. СПбГУ. Факультет географии и геоэкологии. Кафедра картографии. 2007 год.
Огурцова Анна. Исследование программного обеспечения для обработки данных наземного лазерного сканирования и создание 3-D моделей объектов. СПбГУ. Факультет географии и геоэкологии. Кафедра картографии. 2007 год.
---
Программное обеспечение, поставляемое в комплекте с лазерными сканерами, в основном предназначено для управления процессом сканирования и выполнения некоторых стандартных операций по обработке данных. И зачастую, оно не может удовлетворить специфических потребностей, возникающих при решении той или иной задачи. Специализированных программ, позволяющих работать с большими (более миллиарда) облаками точек мало и они в основном специализированы на промышленном проектировании (Cyclone, LFM Modeller).
В условиях дефицита подходящих программных продуктов в нашей компании начата разработка программного комплекса ScanIMAGER, ориентированного в первую очередь на задачи, связанные с фиксацией состояния памятников архитектуры и выполнения архитектурных обмеров.
ScanIMAGER предназначен для работы с облаками точек, получаемых с различных лазерных 3D сканеров. Уникальной особенностью продукта является визуализация огромного количества измерений в сочетании с возможностью отображать цвет измеренной точки, что позволяет воспринимать дискретные данные, как трехмерную модель. Так же приложение предоставляет необходимые инструменты для снятия различных размеров, получения разрезов, сечений и ортофотопланов отсканированных объектов.
Подробнее о программном комплексе ScanIMAGER, предназначенном для обработки результатов трехмерного лазерного сканирования применительно к архитектурным обмерам, вы можете прочитать в статье ScanIMAGER или на сайте продукта scanimager.net
Всегда рады ответить на возникшие вопросы и проконсультировать по 📞 +7 (812) 992-26-85 или электронной почте info@photogrammetria.ru
---









 Программный комплекс ScanIMAGER предназначен для обработки результатов трехмерного лазерного сканирования применительно к архитектурным обмерам. Он построен по модульному принципу и поставляется в различных модификациях.
Программный комплекс ScanIMAGER предназначен для обработки результатов трехмерного лазерного сканирования применительно к архитектурным обмерам. Он построен по модульному принципу и поставляется в различных модификациях.