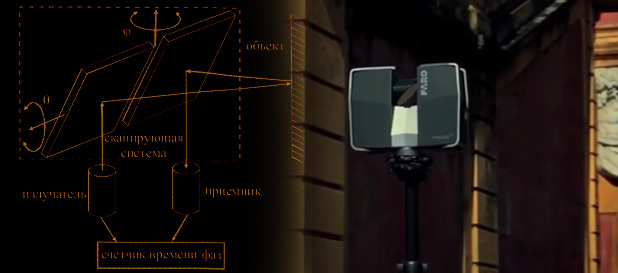
Лазерный сканер — это высокоточный прибор, который за секунды формирует миллионы точек в пространстве. Но есть одна важная деталь: каждый отдельный скан существует в своей собственной локальной системе координат. Начало координат — это место установки сканера, оси направлены так, как прибор был сориентирован в момент съемки.
Что это значит на практике? Если вы сделали 10 сканов фасада здания с разных точек, у вас есть 10 «кусочков» облака точек, каждый в своей системе координат. Сами по себе они бесполезны. Их нужно объединить в единое облако и привязать к реальной системе координат — государственной, местной или условной, в зависимости от требований заказчика.
Этот процесс называется регистрацией (сшивкой) и геопривязкой облака точек.
В компании «Архитектурная Фотограмметрия» (бывш. НПП «Фотограмметрия») мы работаем с облаками точек с 2005 года — с момента, когда лазерные сканеры только начинали появляться на российском рынке. За это время мы отточили методику регистрации до уровня, который позволяет нам гарантировать точность сшивки в пределах 2–5 мм даже на сложных объектах — памятниках архитектуры, промышленных цехах, различных зданиях и сооружениях.
В этой статье мы без лишних сложностей расскажем:
• что такое регистрация и геопривязка облака точек;
• какими методами мы соединяем сканы между собой;
• как мы привязываем облако к геодезическому обоснованию;
• как контролируем точность на каждом этапе.

Что такое регистрация?
Регистрация (или сшивка) сканов — это процесс совмещения двух и более облаков точек, полученных с разных позиций сканирования, в единую систему координат.
Представьте, что вы складываете пазл. Каждый скан — это отдельная деталь. Чтобы детали совпали, нужно найти общие точки между ними — «замки», которые соединяются друг с другом.
В мире лазерного сканирования есть три основных метода регистрации.
Метод 1. Регистрация по маркам (целевым отражателям)
Это классический, «золотой стандарт» для высокоточных работ, особенно на объектах культурного наследия.
Как это работает:
1. Перед сканированием специалисты размещают на объекте специальные маркеры — сферические или плоские отражатели (марки).
2. Каждый сканер «видит» эти марки при съемке.
3. Во время обработки программное обеспечение (например, Leica Cyclone REGISTER или наше собственное ПО ScanIMAGER) автоматически находит центры марок в каждом скане.
4. Программа совмещает сканы по этим общим точкам — одна и та же марка, снятая с двух разных позиций, становится «связкой».
Требования к маркам:
• Минимальное количество — 3 марки на одну пару сканов, но для надежности рекомендуется 5–7.
• Марки должны быть равномерно распределены в пространстве (не на одной линии).
• Желательно, чтобы марки были видны минимум из двух, а лучше из трех сканов.
➕ Плюсы:
• Высокая точность (до 1–2 мм).
• Полностью автоматизируемый процесс (особенно в современном ПО).
• Возможность контроля качества по каждой марке.
➖ Минусы:
• Требует времени на полевую работу — размещение и координацию марок.
• В некоторых случаях сложно разместить марки (например, на фасаде с труднодоступными точками).
Где используем мы: При обмерах фасадов памятников архитектуры, где важна каждая деталь, и на объектах, где требуется сдача документации в КГИОП с подтвержденной точностью.
Метод 2. Регистрация «облако-с-облаком» (Cloud-to-Cloud)
Современный метод, который набирает популярность благодаря своей эффективности.
Как это работает:
Программное обеспечение анализирует геометрию поверхностей в двух сканах и находит характерные точки, которые совпадают — углы зданий, кромки, архитектурные детали. На основе этих «естественных» ориентиров алгоритм рассчитывает взаимное расположение сканов.
➕ Плюсы:
• Не требует размещения марок — экономия времени в поле.
• Можно сканировать с любой точки, не думая о видимости марок.
• Идеален для больших объектов, где расстановка марок трудоемка.
➖ Минусы:
• Требует значительного перекрытия между сканами (минимум 30%, лучше 50–70%).
• На «бедных» геометрией поверхностях (гладкие стены без текстуры) алгоритм может работать нестабильно.
• Точность может быть чуть ниже, чем при маркерной регистрации (но для многих задач этого достаточно).
Где используем мы: Для обмеров интерьеров, промышленных цехов, стропильных систем, где есть много геометрических ориентиров, а также на объектах, где размещение марок физически затруднено (леса, высотные работы).
Метод 3. Тотальное сканирование (одновременная регистрация)
Самый современный и технологичный метод, который используют владельцы новейших сканеров (например, Leica RTC360 с визуально-инерциальной системой VIS).
Как это работает:
Сканер не просто снимает точки, он одновременно фиксирует свое положение в пространстве с помощью встроенных датчиков (инклинометры, гироскопы, камеры, IMU). При переходе с одной точки на другую сканер «понимает», куда и насколько он переместился.
Особенности:
• Регистрация происходит прямо в поле, в реальном времени.
• Оператор видит на планшете, как сшиваются сканы, и может сразу проверить качество.
• Практически не требует постобработки (за исключением финальной привязки к геодезическому обоснованию).
➕ Плюсы:
• Максимальная скорость полевых работ.
• Минимальная постобработка.
• Снижение человеческого фактора.
➖ Минусы:
• Требует сканер соответствующего класса (не у всех есть).
• Точность чуть ниже, чем у маркерной регистрации на больших объектах.
Где используем мы: В парке нашей компании есть высокопроизводительные сканеры с поддержкой тотального сканирования. Этот метод мы применяем на крупных объектах, где важна скорость — промышленные площадки, мониторинг деформаций, съемка больших территорий.
Итог по регистрации: как мы выбираем метод
| Тип объекта | Рекомендуемый метод регистрации | Почему |
| Памятник архитектуры (фасад, лепнина) | По маркам | Высшая точность, контроль по каждой точке, требуется для КГИОП |
| Интерьеры с богатой геометрией (кессоны, колонны, арки) | Cloud-to-cloud | Быстро, нет необходимости клеить марки на ценные поверхности |
| Производственный цех, стропильная система | Cloud-to-cloud или тотальное | Много естественных ориентиров, большие объемы |
| Крупный объект (мониторинг, промышленная площадка) | Тотальное сканирование | Скорость, полевой контроль качества |
| Объект с последующей сдачей в Госэкспертизу | По маркам + контрольные точки | Требование нормативной документации |
После того как сканы сшиты между собой, мы получаем единое облако точек, но все еще в локальной системе координат — начало отсчета находится внутри самого облака (обычно в точке первого скана).
Задача второго этапа — геопривязка (georeferencing) — преобразование облака в реальную систему координат.
Что такое реальная система координат?
Это может быть:
• Государственная система (например, МСК-50 для Москвы, СК-63 или СК-95 для других регионов, WGS-84/ГЛОНАСС для спутниковых данных). Используется по требованию госорганов и для интеграции с внешними данными.
• Местная система города или района (привязана к государственной через ключи перехода). Самый частый случай для городской застройки.
• Условная система, заданная заказчиком (обычно для внутренних проектных задач, не требующих внешней привязки).
Как выполняется геопривязка: три метода
Метод 1. Прямая геопривязка (Direct Georeferencing)
Что это: Сканер с самого начала устанавливается на точке с известными координатами и ориентируется (например, по GPS-антенне или по направлению на известный ориентир).
Как реализуется:
• Сканер устанавливается на штатив над пунктом геодезического обоснования.
• Координаты этого пункта загружаются в сканер.
• Сканер определяет свою ориентацию (например, по двум опорным точкам или по встроенному GPS-компасу).
➕ Плюсы: Минимум постобработки, облако сразу получается в нужной системе координат.
➖ Минусы: Требует, чтобы у вас были пункты обоснования в каждой точке съемки — на практике это редко бывает.
Где используем: При комбинированной съемке — например, когда мы закладываем GPS-приемником точки обоснования, а затем сканируем с тахеометра, который уже сориентирован в этой системе.
Метод 2. Непрямая (косвенная) геопривязка по контрольным точкам
Это основной метод в нашей практике.
Как это работает:
1. Перед сканированием (или во время) геодезист (или мы сами) определяет координаты опорных марок — специальных отражателей — с помощью высокоточного GPS или тахеометра.
2. Эти марки попадают в сканы (их центры «видны» в облаке точек как отчетливые сферы или плоские цели).
3. В процессе постобработки программное обеспечение «вычитает» координаты марок из облака точек и выполняет преобразование Гельмерта (7-параметрическое преобразование: сдвиг по X, Y, Z, поворот по трем осям и масштабирование).
4. В результате облако точек оказывается «посаженным» на реальные координаты.
Важное уточнение: Минимальное количество контрольных точек для преобразования — 3, но мы всегда закладываем 4–6 и более для контроля качества и уравнивания.
Откуда берутся координаты контрольных точек?
Два варианта:
| Вариант | Описание | Когда применяем |
| Из внешнего геодезического обоснования | Мы или заказчик заранее создаем сеть пунктов (марки на стенах, дюбели в асфальте, закладные знаки). Их координаты определяются GPS или тахеометрией. | Объекты ОКН, промышленные площадки, где требуется привязка к госсистеме. |
| Из собственных измерений тахеометром | Наши специалисты в день сканирования сами обходят объект с тахеометром и снимают координаты марок. | Небольшие объекты, где нет готового обоснования. |
➕ Плюсы метода:
• Наивысшая точность (до 2–5 мм в абсолютных координатах).
• Полный контроль — вы знаете, что каждая марка имеет свой «паспорт» с координатами.
• Возможность проверки — сравниваем «расчетное» положение марки в облаке с «измеренным» (в отчете указываются невязки).
Метод 3. Выравнивание по опорному облаку или CAD-модели
Как это работает: Если у вас есть уже привязанное облако точек той же территории (например, с прошлого мониторинга) или точная CAD-модель здания с реальными координатами, новое облако можно «выровнять» по этому эталону.
➕ Плюсы: Не требует полевых контрольных точек.
➖ Минусы: Требует наличия эталонных данных.
Где используем: При мониторинге деформаций, когда мы снимаем объект повторно. Первое облако уже привязано, последующие мы просто совмещаем с ним.
Этапы обработки облака точек от начала до конца
Объединим все в единый технологический процесс.
Шаг 1. Полевая работа — сканирование
• Выставление сканера в точках съемки.
• Сканирование с захватом марок (если они есть) или просто геометрии.
• Для тотального сканирования — автоматическая предварительная регистрация прямо в поле.
Шаг 2. Импорт и первичная обработка
• Перенос данных с флеш-карты сканера в ПК.
• Запуск специализированного ПО (Leica Cyclone REGISTER, Trimble RealWorks, Faro Scene, наше собственное ScanIMAGER или другое в зависимости от оборудования).
Шаг 3. Регистрация (сшивка) сканов между собой
• Если работали по маркам: ПО автоматически находит марки, сопоставляет их между сканами, рассчитывает взаимное расположение.
• Если работали по облаку: ПО в автоматическом или полуавтоматическом режиме ищет общие геометрические признаки (feature-based registration).
• Если тотальное сканирование: Этот шаг пропускается — сканы уже сшиты.
Контроль качества:
• Проверяем ошибки по маркам (в отчете — «Ошибка (м)» по каждому маркеру).
• Оцениваем среднеквадратическую ошибку репроецирования (<0.5 пикселя для хорошего качества).
• Визуально проверяем стыки сканов.
Шаг 4. Импорт геодезического обоснования (контрольных точек)
• Загружаем координаты опорных марок (из внешнего файла или вводим вручную).
• Координаты могут быть в государственной (например, МСК-50), местной или условной системе — как требуется по ТЗ.
Шаг 5. Геопривязка (трансформация)
• В ПО выбираем метод «Регистрация по контрольным точкам».
• Указываем, какая марка в облаке соответствует какой опорной точке в каталоге координат.
• Запускаем преобразование Гельмерта (3D-трансформация сдвига, поворота, масштаба).
Контроль качества:
• ПО выдает невязки по каждой контрольной точке — разницу между «расчетным» и «измеренным» положением.
• Приемлемые значения: до 3–5 мм для большинства задач.
• Если какая-то точка имеет невязку >10 мм — проверяем, возможно, ошибка в измерениях или марка была смещена.
Шаг 6. Экспорт и финальная проверка
• Экспортируем привязанное облако точек в формате .rcp, .e57, .las, .pts или другом — по требованию заказчика.
• При необходимости «обрезаем» шум, удаляем артефакты (лишние объекты — прохожие, машины, строительный мусор).
• Формируем отчет — в нем фиксируем количество сканов, количество точек, метод регистрации, ошибки по маркам, использованную систему координат и ключи перехода (если это местная система).
Что вы получаете на выходе?
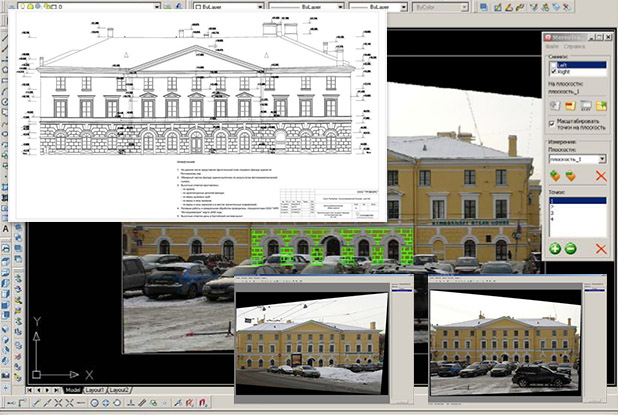
• Точно привязанное облако точек, которое можно открыть в AutoCAD, Revit, Navisworks, ArchiCAD и любом другом ПО, работающем с 3D-данными.
• Гарантию, что ваши обмерные чертежи, разрезы, BIM-модель будут соответствовать реальному положению здания на местности.
• Возможность сдачи документации в КГИОП, Мосгорнаследие и другие контролирующие органы — без привязки к системе координат документы не примут.
Какие риски мы исключаем?
| Риск при плохой привязке | Как мы его исключаем |
| Облако точек «повисает в воздухе» — нет привязки к реальным координатам | Всегда создаем геодезическое обоснование или используем контрольные точки |
| Разные сканы не совпадают друг с другом — трещины, двойные стены | Используем маркерную или облачную регистрацию с контролем ошибок |
| Невозможно сделать повторные обмеры через год — не с чем сравнивать | Сохраняем контрольные марки (по возможности) и фиксируем их координаты в отчете |
| Отказ экспертизы в приемке чертежей | Предоставляем полный отчет с ошибками по каждой контрольной точке — это принимают все госорганы |
Привязка облака точек к геодезическому обоснованию — это та «невидимая», но абсолютно критическая работа, которая отличает профессиональный обмер от кустарного.

В компании «Архитектурная Фотограмметрия» мы:
✔ Владеем всеми методами регистрации — от классической маркерной до тотального сканирования и регистрации по облаку.
✔ Используем лучшее оборудование — лазерные сканеры Leica, Faro, Trimble, которые позволяют нам работать с любой геометрией.
✔ Разработали собственное ПО ScanIMAGER — оно оптимизировано под задачи архитектурных обмеров и позволяет нам контролировать качество на всех этапах.
✔ Накопили опыт с 2005 года — мы делали облака точек, когда это было «экзотикой», и сегодня знаем все тонкости процесса.
Что вы получаете, заказывая обмеры у нас:
→ Облако точек в нужной системе координат (государственной, местной, условной).
→ Полный отчет по регистрации и геопривязке — с цифрами, схемами и гарантией точности.
→ Возможность использовать эти данные для проектирования, реставрации, BIM, мониторинга — без доработок и «допиливания».
📞 Позвоните: +7 (812) 992-26-85
📧 Напишите: info@photogrammetria.ru
💻 Оставьте заявку на сайте — и мы подготовим коммерческое предложение под вашу задачу.
#облакотточек #лазерноесканирование #регистрациясканов #геопривязка #фотограмметрия #обмерныеработы #3dсканирование








 Программный комплекс ScanIMAGER предназначен для обработки результатов трехмерного лазерного сканирования применительно к архитектурным обмерам. Он построен по модульному принципу и поставляется в различных модификациях.
Программный комплекс ScanIMAGER предназначен для обработки результатов трехмерного лазерного сканирования применительно к архитектурным обмерам. Он построен по модульному принципу и поставляется в различных модификациях.